Модель становится истинной при появлении заданного сочетания логических уровней, сохранении его в течение всего события.
Пользователь может выбрать синхронизацию цифрового осциллографа по наступлению истинности модели (началу выполнения набора условий) или по наступлению ее ложности (прекращению выполнения набора условий).
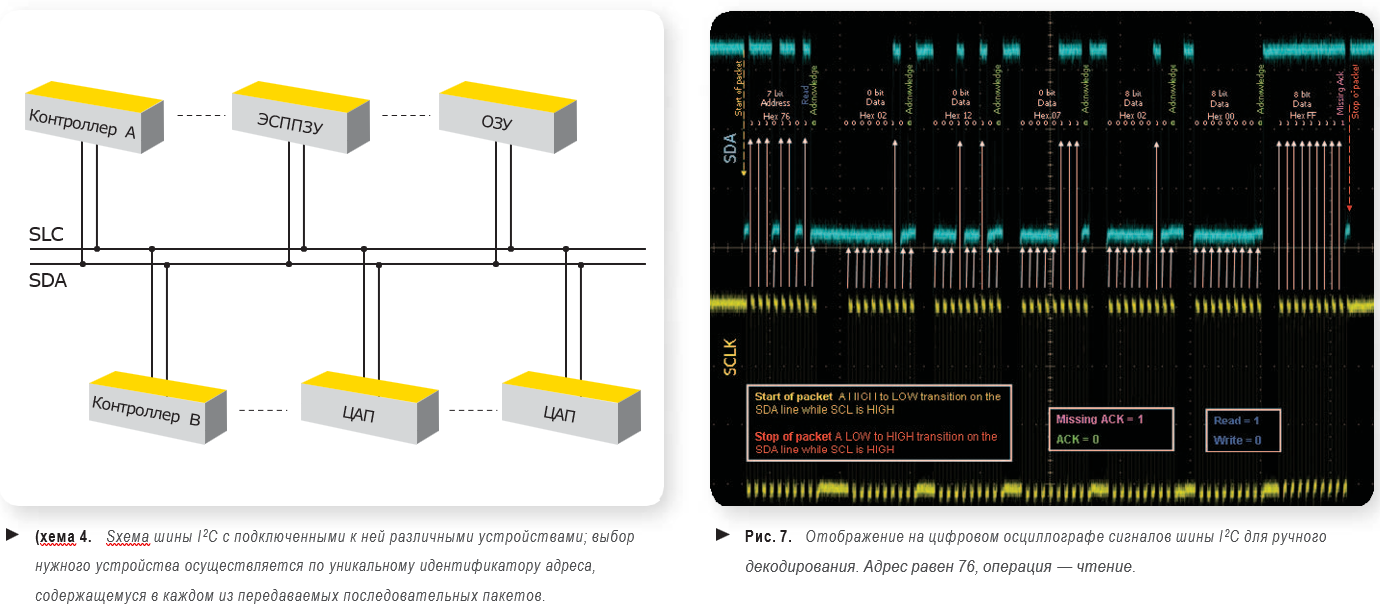
В синхронных системах (в которых применяются системные тактовые сигналы), можно задавать синхронизацию по состояниям. В уже использованном примере шины заменим приемный буферный элемент на буфер с защелкой. На рис. 9 изображена установка состояний входов устройства при синхронизации по модели. Для канала 3 установлен низкий уровень. Для каналов 1 и 2 установлен высокий уровень.
Фиксируется неправильное состояние; обнаруживается неполадка, состоящая в слишком большой задержке сигнала по каналу 3. Для правильной работы защелки необходимо, чтобы при переходе каналов 1 и 2 на высокий уровень на входной линии канала 3 был высокий уровень. Такой подход можно применять только в тех системах, где сигналы управления различных устройств и адресация шин синхронизируются главным тактовым сигналом.
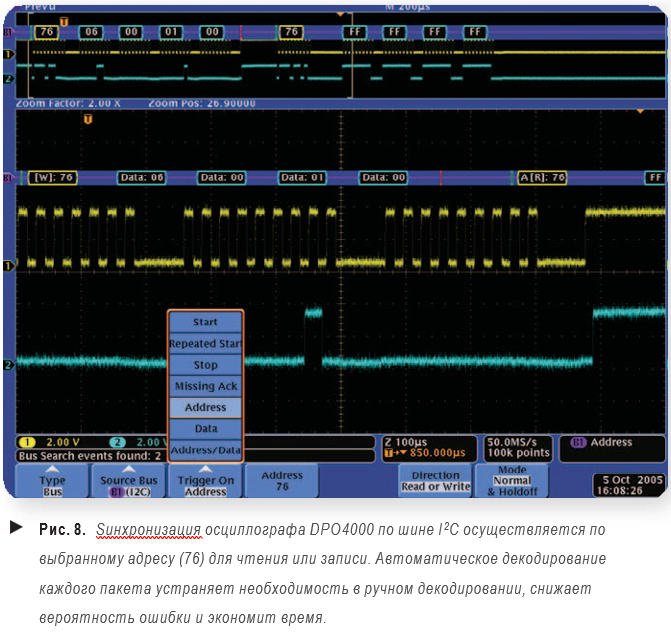
Метастабильность проявляется в виде неопределенных или нестабильных состояний данных. При этом в выходном сигнале могут появиться выбросы, ведущие к неполадкам. Обычно такие состояния появляются редко, что затрудняет обнаружение
и фиксацию подобных явлений. Метастабильные состояния могут появиться из-за нарушений времени установки и фиксации на входе схем с защелками, схожих с D-триггером, осциллограммы которого изображены на рис. 10.
На рис. 11 изображены сигналы данных (DATA) и тактов (CLOCK) при асинхронном запуске триггера. Aногда из-за нарушения времени установки и фиксации нарастающий фронт тактового сигнала совпадает с изменением состояния данных. При этом состояние выхода триггера может либо сохранить исходное значение, либо измениться в соответствии с изменением данных, либо «зависнуть» между этими двумя состояниями. Во время этого кратковременного «зависания» триггер становится метастабильным, а на его выходе (Q или /Q) наблюдается случайный сигнал.
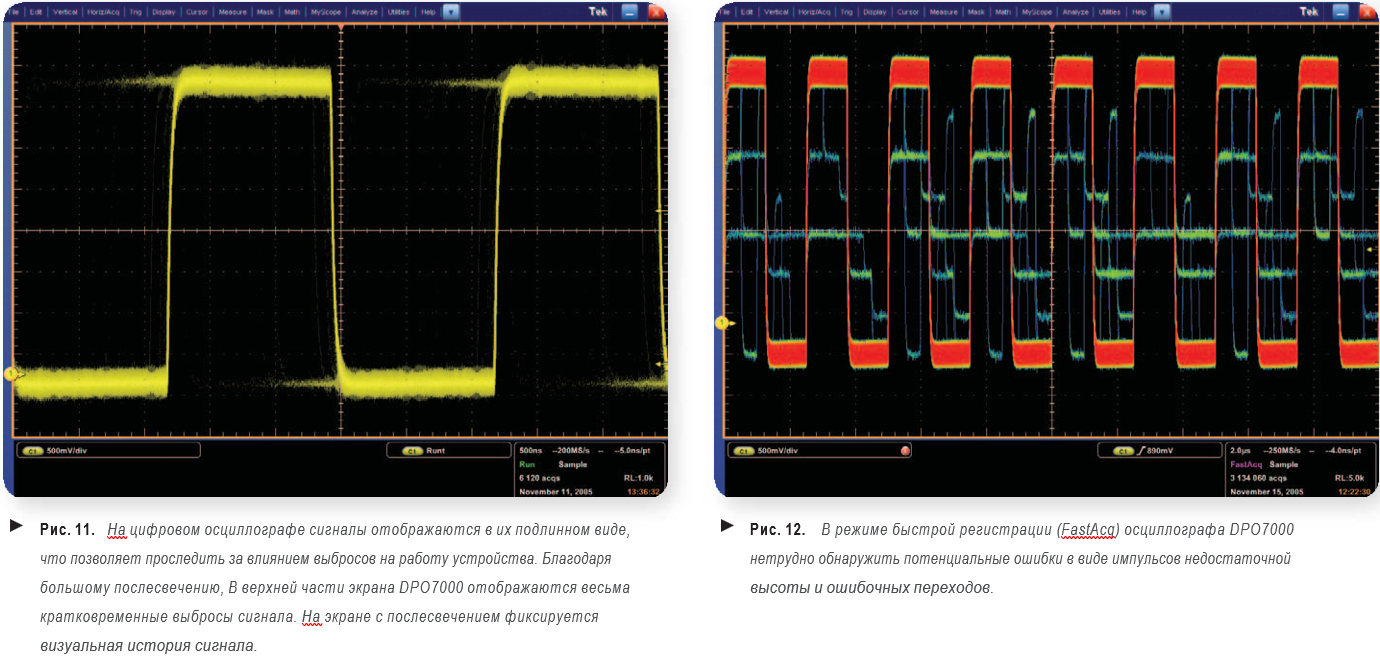
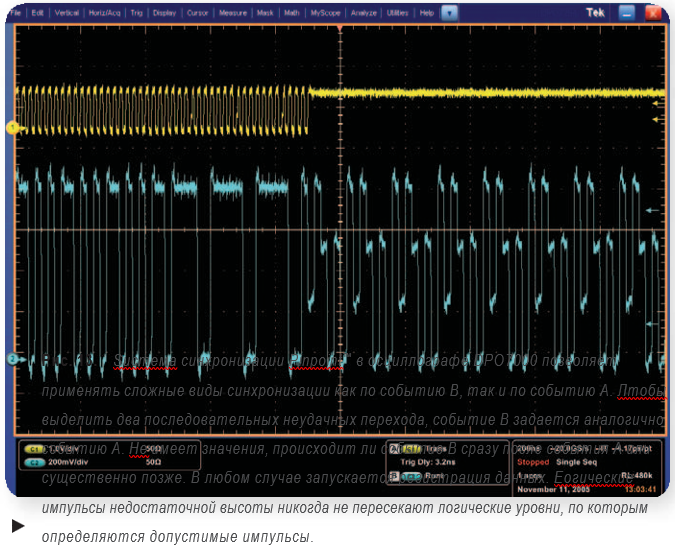
На рис. 13 триггер не может захватить данные, возвращающие его в предыдущее состояние. Хотя такие состояния не обнаруживаются с помощью обычной синхронизации, синхронизация по состояниям позволяет надежно фиксировать метастабильные состояния, в данном случае – переход к импульсу недостаточной высоты. В синхронизации по переходу и по импульсам недостаточной 1 высоты для захвата метастабильных сигналов используется условие двойного порога по амплитуде.
Обнаружение метастабильности, как и устранение других трудных проблемы во время отладки, облегчается при использовании
сложных видов синхронизации. Система синхронизации Pinpoint в цифровом осциллографе DPO7000 предоставляет один из самых полнофункциональных механизмов синхронизации для отладки цифровых систем, поскольку может использоваться во
всей ширине полосы пропускания осциллографа. Характеристики и функции системы Pinpoint позволяют обнаруживать трудноуловимые события в прототипах устройств.
Регистрация выбросов
Выброс – общий термин, обозначающий любое отклонение от идеальной формы цифрового сигнала. Выбросы – очень узкие
и крутые случайные импульсы, которые могут интерпретироваться в системе как изменения логического состояния. Выбросы порождают много разнообразных ошибок и с трудом поддаются обнаружению. Aх влияние на работу системы непредсказуемо. Большинство неполадок в системе проявляется в виде выброса на одном или нескольких сигналах. Bасто выбросы служат первым признаком различных сбоев устройства, включая шумы, логические гонки, неправильное согласование нагрузок, ошибки буферных усилителей, перекрестные помехи, нарушение времени установки и фиксации и другие нарушения временных соотношений.
Крутые фронты цифровых сигналов содержат высокие частоты; поэтому необходимо соответствующее согласование нагрузок проводников на печатной плате устройства. Aз-за крутых фронтов увеличиваются переходные токи; в результате увеличиваются динамические токи, приводящие к появлению колебаний в шине заземления или выбросов в шине питания.
Кроме того, из-за крутых фронтов увеличиваются перекрестные помехи. Проводники на печатной плате, которые ранее рассматривались как цепи с сосредоточенными параметрами, теперь превратились в передающие линии, требующие соответствующего согласования нагрузки.
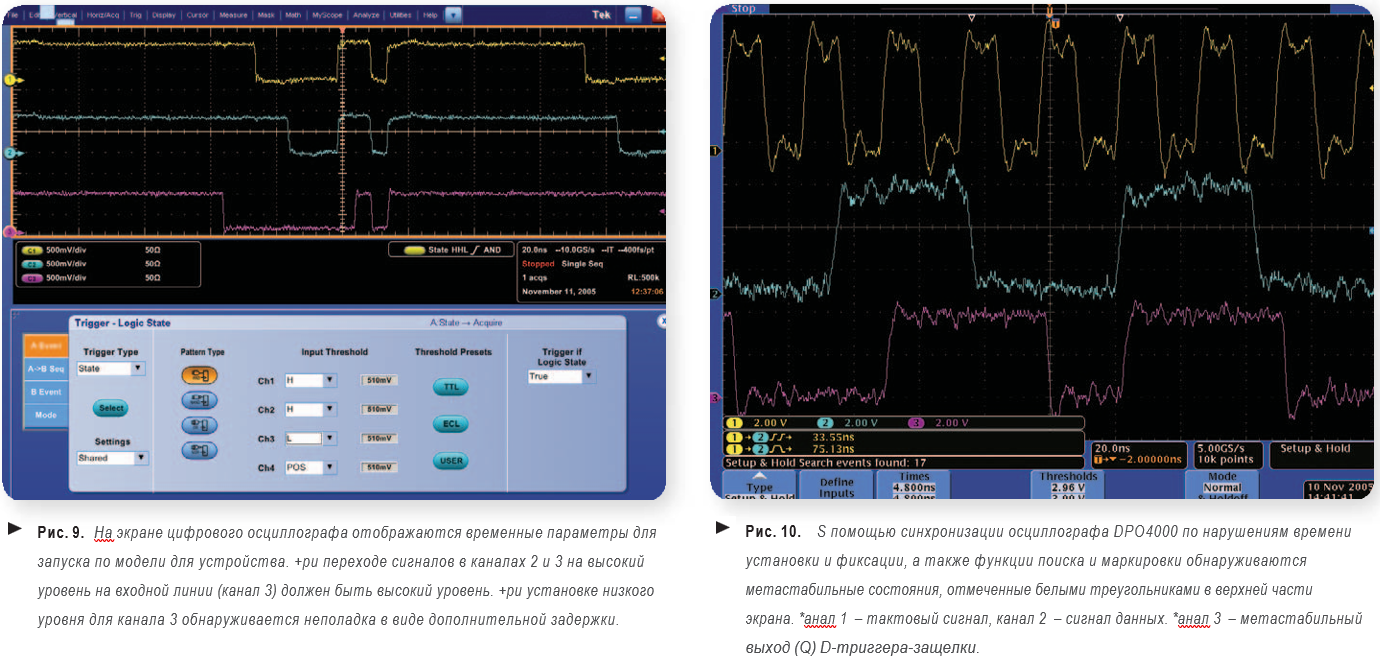
При неправильной работе схемы разумно будет начинать отладку с поиска выбросов. Bтобы рассмотреть выбросы, рекомендуется сравнить аналоговое и цифровое представления сигнала на цифровом осциллографе. Большинство неполадок проявляется
в виде выбросов по меньшей мере в одном сигнале, а часто и в нескольких.
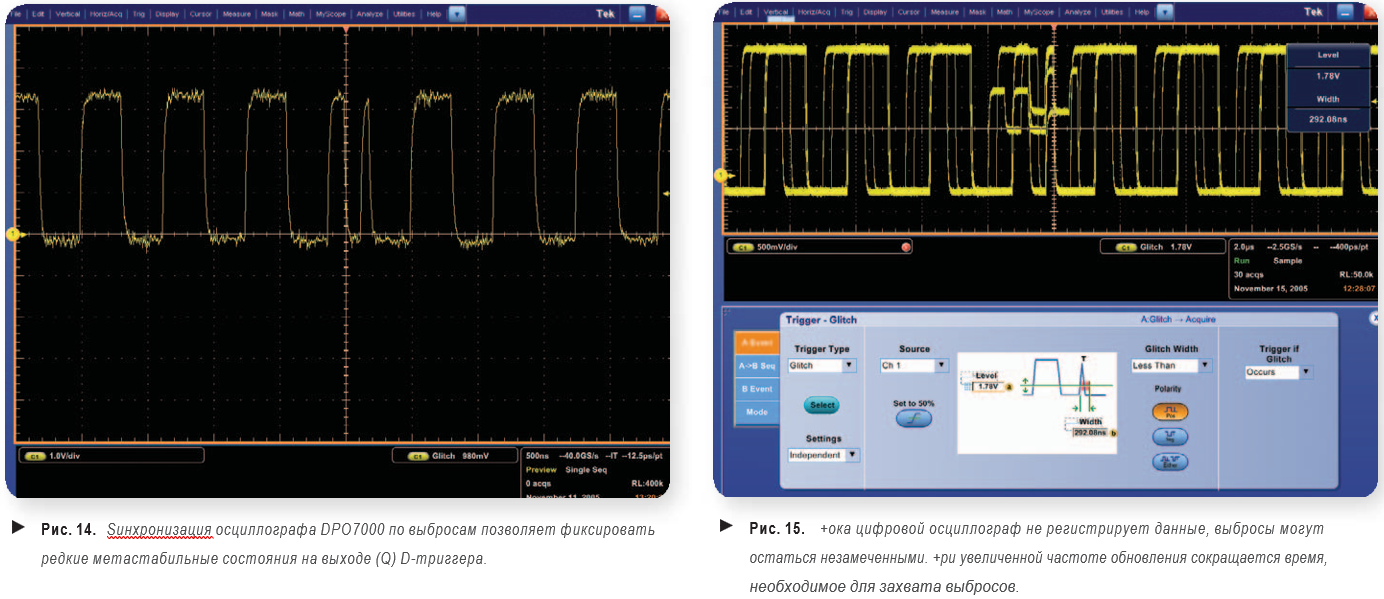
Например, на цифровом осциллографе могут отображаться искажения нарастающего и ниспадающего фронтов цифрового импульса. Нарастающий фронт недостаточно медленный, чтобы вызвать логический переход; поэтому выброс не появляется.
С помощью цифрового осциллографа, например DPO7000,
с синхронизацией по длительности импульса можно, захватывая такие периодически появляющиеся выбросы, проследить источник неполадки.
Обнаружение нестабильности фронтов
Нестабильностью фронтов называются нежелательные изменения временных соотношений в любой последовательности тактовых импульсов или сигналов данных. Нестабильность фронтов проявляется во всех электрических системах, в которых для представления информации о временных соотношениях используются перепады напряжения. Это кратковременные отклонения цифрового сигнала от его идеального положения во времени. Нестабильность фронтов, как случайный процесс, снижает быстродействие системы и мешает отладке.
Быстрые изменения временных соотношений, влияющие на период или фазовый сдвиг соседних или отдаленных фронтов импульсов, вызывают нестабильность фронтов. Проще говоря. нестабильность – это отклонение фронтов от «правильного» положения во времени.
PaAмеется три типовых способа измерения нестабильности фронтов по осциллограмме: нестабильность периода, нестабильность между циклами и нестабильность временного интервала. На временной диаграмме (схема 5) показано, как соотносятся между собой эти измерения.
Нестабильность за период – измеряется в каждом периоде тактового импульса на осциллограмме. Cсли осциллограф синхронизируется по первому фронту одного периода, при этом на втором фронте определяется нестабильность за период.
На схеме 5 изображен тактовый сигнал с временной нестабильностью. Пунктирными линиями обозначены идеальные положения фронтов, соответствующие сигналу без нестабильности.
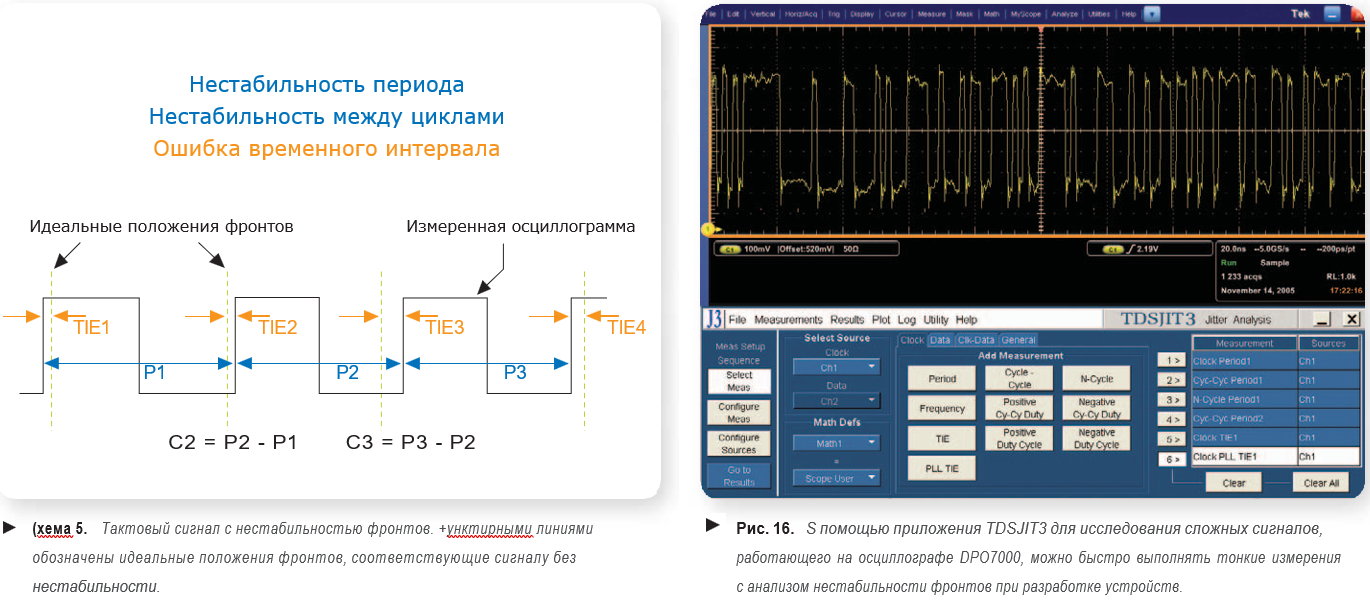
Нестабильность между циклами определяет величину изменения периода между двумя соседними периодами тактового сигнала.
Нестабильность между циклами, обозначенная на схеме 5 величинами C2 и C3, показывает, насколько изменяется период тактового сигнала между двумя циклами. Как видно, нестабильность между циклами можно определить, вычислив производную первого порядка от нестабильности за период.
Это измерение может представлять интерес постольку, поскольку оно отображает быстрые динамические изменения, которым может быть подвержена система EАПB в схеме восстановления тактового сигнала. Для вычисления нестабильности за период
и нестабильности между периодами не требуются ни сведения об идеальном положении фронтов, ни опорная частота.
Ошибка временного интервала (TIE) показывает, насколько отклоняется каждый активный фронт тактового сигнала от своего идеального положения. Для этого измерения необходимо либо знать идеальное положение фронтов, либо оценить его.
Значение этого измерения в том, что оно показывает эффект накопления малой нестабильности периода с течением времени.
Нестабильность периода, отображенная в измерениях P1, P2 и P3 на схеме 5, это просто отсчеты длительности каждого периода тактового сигнала на осциллограмме. Это самое простое
и непосредственное из возможных измерений.
Значение размаха можно оценить, настроив цифровой осциллограф на отображение немного более чем одного полного периода тактового сигнала и установив неограниченное послесвечение. Если осциллограф синхронизируется по первому фронту, нестабильность периода проявляется на втором фронте, как показано на схеме 5.
Ошибка временного интервала показана на схеме 5 в виде измерений TIE1 – TIE4. Ошибка временного интервала (TIE) показывает, насколько сильно каждый активный фронт тактового сигнала отклоняется от идеального положения.
Для выполнения этого измерения требуется знать или оценить идеальное положение фронтов. Непосредственное наблюдение ошибки временного интервала (TIE) на осциллографе, не оснащенном средствами восстановления тактовой частоты или цифровой обработки сигнала, затруднено.
Кроме того, ошибку временного интервала можно измерить путем интегрирования нестабильности периода после вычитания из каждого отсчета номинального (идеального) значения периода. Измерение ошибки временного интервала позволяет выявить эффект накопления малых значений нестабильности периода с течением времени. Если ошибка временного интервала достигает значения ±0,5 одиночного интервала, глазковая диаграмма закрывается, и в приемнике происходят ошибки в битах.
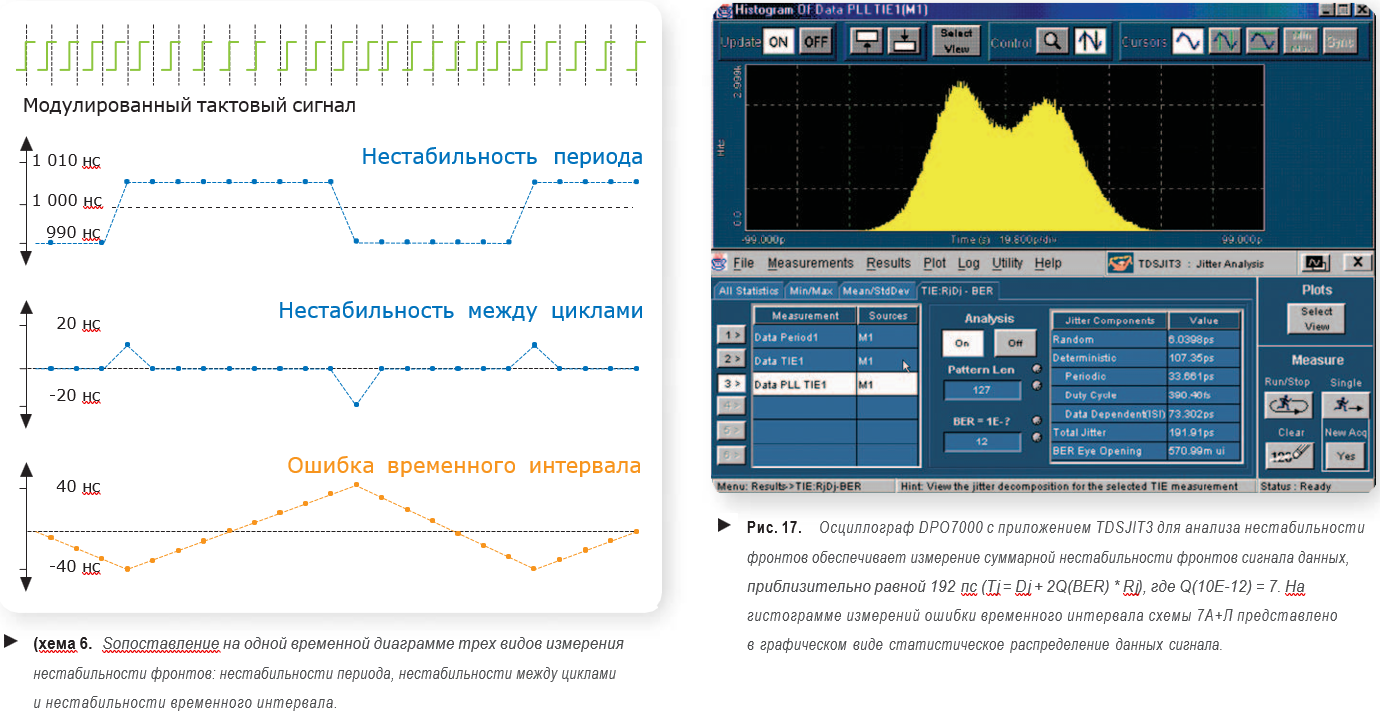
На схеме 6 сравниваются все три способа измерения нестабильности фронтов на одной осциллограмме. В этом примере номинальный период сигнала равен 1 мкс, а фактический изменяется
с чередованием восьми периодов по 990 нс и восьми периодов по 1010 нс. В нестабильности фронтов присутствует как случайная, так и детерминированная составляющая. Aз-за наличия случайной компоненты желательно представлять нестабильность с помощью обычных статистических приемов. Для получения значимых и повторяющихся результатов измерений используются такие параметры как среднее значение, среднеквадратичное (стандартное) отклонение и размах, а также определители, например доверительный интервал.
Детерминированная нестабильность (Dj) – это повторяющаяся и предсказуемая нестабильность временных соотношений.
Размах детерминированной нестабильности (Dj) ограничен, и эти границы можно наблюдать или предсказать с высокой степенью уверенности по относительно небольшому числу наблюдений.
Детерминированная нестабильность обусловлена следующими причинами:
- Периодическая нестабильность (Pj), вызванная такими источниками периодического шума как блоки питания, близко расположенные генераторы колебаний и в некоторых случаях – перекрестные помехи из близлежащих шин.
- Отклонения скважности (DCD) вызываются разбалансировкой уровней нагрузки выходного каскада или влиянием изменений температуры внутри передающего устройства.
- Межсимвольная интерференция (ISI), называемая также нестабильностью данных (DDj), вызывается потерей частот на тракте прохождения сигнала, по большей части из-за потерь в соединениях и кабелях.
Случайная нестабильность (Rj) – это неупорядоченный
и непредсказуемый шум. Основным источником случайного шума в электрических цепях является тепловой шум (шумы Джонсона и шумовые выбросы). Случайный шум считается распределенным по закону Hаусса без ограничения размаха основного распределения, то есть чем больше выборок взято, тем больше измеренное значение размаха.
Периодическая нестабильность (Pj) циклически повторяется. Поскольку периодические колебания раскладываются по синусоидам в гармонический ряд Eурье, такая нестабильность иногда называется синусоидальной нестабильностью. Периодическая нестабильность обычно вызывается внешними источниками детерминированных помех, например помехами от импульсных блоков питания или от мощных местных радиосигналов. Кроме того, такие помехи могут быть вызваны нестабильностью системы EАПB в схеме восстановления тактовых сигналов.
Нестабильность данных (DDj) – это любая нестабильность, коррелированная с последовательностями в потоке бит данных. Нестабильность данных часто обусловлена частотной характеристикой кабеля или устройства. Нестабильность данных называют также нестабильностью модели (PDj). Она является измеримым результатом межсимвольной интерференции (ISI).
Отклонения скважности (DCD) – это изменения скважности относительно номинального значения, равного 50%. Aмеется две типичных причины отклонений скважности: отличие наклона нарастающих фронтов от наклона ниспадающих фронтов или отклонение порога срабатывания для сигнала в верхнюю или нижнюю сторону от номинального положения вследствие сдвига среднего значения сигнала по постоянному току.
Суммарная нестабильность при частоте ошибочных битов (Tj @ BER) – оценка размаха нестабильности при
заданной пользователем частоте появления ошибочных битов.
Кроме того, по частоте ошибочных битов (BER) в сочетании с единичным интервалом оценивается раскрытие глазковой диаграммы, которое отображается на U-образной кривой частоты ошибочных битов.
Автоматические измерения и анализ
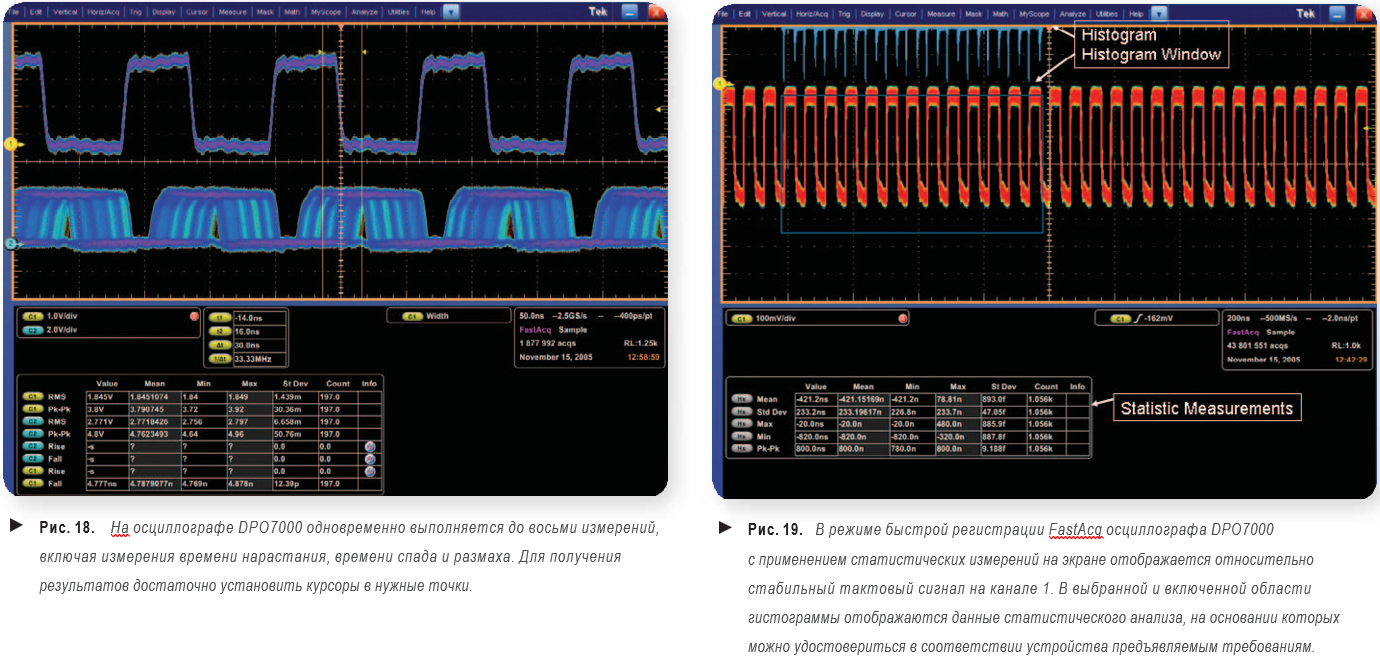
Автоматические измерения и статистический анализ высокочастотных сигналов позволяют добиться лучшего понимания процессов при отладке устройства. Многочисленный
средства автоматических измерений и статистического анализа, имеющиеся в современных цифровых осциллографах, обеспечивают гибкость и производительность, необходимые для выполнения отладки. Одновременное отображение четырех или восьми осциллограмм позволяет сравнивать осциллограммы и прокручивать их для исследования из соотношений.
Автоматизированные измерения, запускаемые нажатием кнопки, открывают новые способы исследования неполадок, включающие сбор статистики измерений, определение опорных уровней
и использование возможностей осциллографа для выполнения задач отладки. После регистрации и сопоставления нескольких экранных измерений цифровой осциллограф отображает статистику и возможные отклонения по каждому из них.
Это позволяет установить, работают ли компоненты в заданных пределах или их допуски изменились и нуждаются в коррекции. К числу типичных автоматических измерений, позволяющих ускорить отладку, относятся измерения длительности импульсов, выбросов, скважности размаха, а также более сложные статистические измерения, например измерение минимума, максимума и среднеквадратического значения (Root Mean Square, RMS).