Кабельный тестер, даже бюджетный, вполне с этим справится
Магазин Gtest(R)
предлагает широкую номенклатуру кабельных тестеров по ссылке в самом конце
настоящего Раздела, а также рекомендуемые приборы для тестирования кабельных и
сетевых инфраструктур. Также рекомендуются статьи для последующего
самообразования
Вводное
Представлена простая, экономичная и успешная конструкция для определения расстояния и длины кабеля. Система измерения основана на непрерывном повторении импульса, который бесконечно проходит по детектируемому расстоянию. На обоих концах измеряемого расстояния или кабеля имеется повторитель импульсов. Бесконечное повторение импульса генерирует частоту, которая меняется почти обратно пропорционально измеряемому расстоянию. Разрешение и диапазон расстояний или длин кабеля можно регулировать, изменяя задержку времени повторения, вносимую на обоих концах, и время измерения. Благодаря этой конструкции расстояние может быть измерено с разрешением в сантиметрах с использованием электронной системы с микросекундным разрешением, что упрощает классические конструкции времени полета, для которых требуется электроника с пикосекундным разрешением.
1.Введение
Системы измерения расстояний и местоположения имеют множество важных применений. Локальное позиционирование или локализация могут быть достигнуты посредством двух или более измерений расстояния. Мобильное устройство с помощью методов локального позиционирования может либо собирать информацию о своем местоположении, либо может быть локализовано из другого места. В этом контексте значительное внимание привлекают системы локального позиционирования [1].
Выбор технологии зависит от различных обстоятельств, таких как использование на открытом воздухе или в помещении, диапазон измеряемых расстояний, стоимость системы, точность и т. д. В большинстве ситуаций на открытом воздухе, когда доступна прямая видимость спутников, выбранной технологией является GPS. Другими доступными технологиями, находящимися в стадии активных исследований (некоторые для внутреннего применения), являются: гидролокаторы [2,3], времяпролетные системы [4], радиомаяки [5], системы на основе лазерно-оптических технологий [6,7], системы видения [ 8,9].
|
Таблица 1. Сравнение с другими системами измерения расстояний. |
||||
|
Технология |
Разрешение |
Цена |
Расстояние |
Подробности |
|
Ультразвук |
Среднее, 3–5 cm |
Низкая |
Low, 8 meters |
Очень маленькое расстояние Требуется прямое видение Простая электроника |
|
Лазер |
Высокое, 2–5 mm |
Высокая |
High, Km |
Требуется прямое видение Пикосекундная электроника |
|
Зрительная |
Среднее, 10 cm |
Низкая |
Low, 20 meters |
Требуется прямое видение Пикосекундная электроника |
|
Радар |
Низкое, 30 cm |
Высокая |
High, Km |
Пикосекундная электроника |
|
DGPS |
Высокое, 10 cm |
Средняя |
High, Km |
Только наружное использование |
Прототип, описанный в этой статье, представляет собой недорогую систему измерения расстояния, основанную на повторении импульсов между парой приемопередатчиков. В этих условиях в результате бесконечного распространения импульса генерируется частота, эта частота обратно пропорциональна времени полета, поэтому можно получить расстояние между парой приемопередатчиков. Основным преимуществом нашей системы является то, что с помощью микросекундной электроники можно измерять расстояние с сантиметровым разрешением. Традиционной времяпролетной радиочастотной системе требуется пикосекундное электронное разрешение, чтобы получить аналогичное разрешение по расстоянию.
Другие преимущества нашей системы перед другими доступными и эквивалентными системами заключаются в том, что нашей системе не требуется прямой обзор от передатчиков к приемникам, в отличие от гидроакустических или лазерных систем. Нашу систему можно установить внутри помещения, а наша конструкция очень дешева (Таблица 1).
2.Описание системы
Как уже упоминалось, предлагаемая система измерения основана на бесконечном и непрерывном повторении электрического импульса, распространяющегося на измеряемом расстоянии (рис. 1). На обоих концах измеряемого расстояния или кабеля имеется оборудование повторения импульсов на основе моностабильной интегральной схемы, которая генерирует новый импульс после постоянной задержки Td каждый раз при получении импульса, в действительности Td будет включать в себя всю подсистему. задержки, которые представляют собой задержки, вносимые также передатчиком и приемником. Предположим, что необходимо измерить нулевое расстояние, тогда период T каждого цикла будет равен. T = 2Td, поскольку повторение импульсов приводит к одинаковой задержке на обоих концах, Td. Если учитывать расстояние, пройденное волной, новый период будет равен , где Tf — время полета, то есть время, необходимое импульсу для прохождения от терминала 1 к терминалу 2 или наоборот, с T — время, за которое импульс должен совершить полный круг от клеммы 1 до клеммы 2 и обратно, см. Рисунок 1. Если d — расстояние, которое необходимо измерить, а v — скорость распространения пульсовой волны,, где T — общее время прохождения круга. : которая, выраженная как частота f, подразумевает:
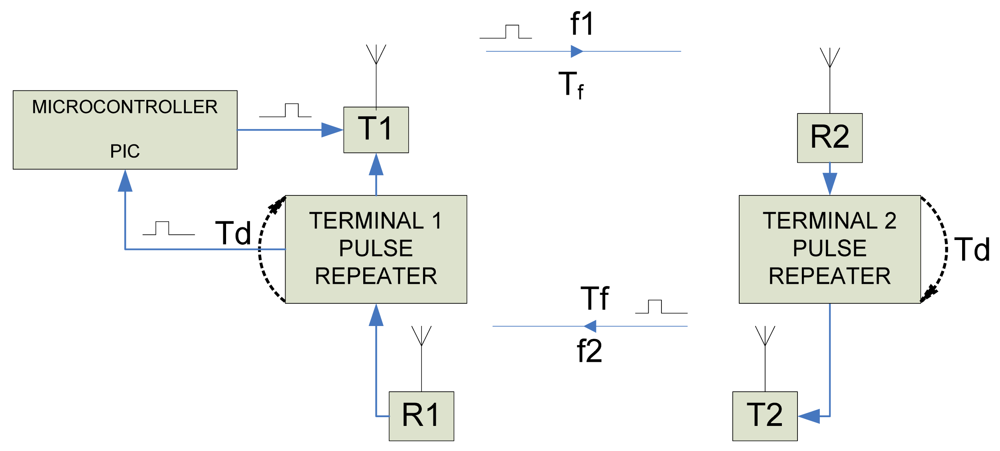
Рисунок 1. Блок-схема прототипа системы.
Уравнение (1) показывает, что измеренная частота f уменьшается с увеличением расстояния d.
Выбор соответствующей задержки повторения на обоих терминалах, Td, зафиксирует максимальную и минимальную частоты, захватываемые для определенного диапазона расстояний. Чувствительность значительно снижается с увеличением расстояния d, как видно из уравнения (2) и таблицы 1:
Уравнение (2) показывает, как чувствительность существенно меняется в зависимости от расстояния d и задержки повторения импульса Td. Можно заметить, что чувствительность значительно снижается при увеличении обеих величин. На рисунке 2 и в таблице 1 показано, как f и Δf нелинейно уменьшаются с расстоянием d, которое необходимо измерить, согласно уравнению (1) и уравнению (2) соответственно. Выбор подходящего значения Td будет зависеть от диапазона измеряемых расстояний и требуемой точности, чувствительности и разрешения. Точность, чувствительность и разрешение увеличиваются за счет уменьшения Td, но такое снижение Td имеет недостаток, заключающийся в увеличении полосы пропускания и сложности электронной схемы.
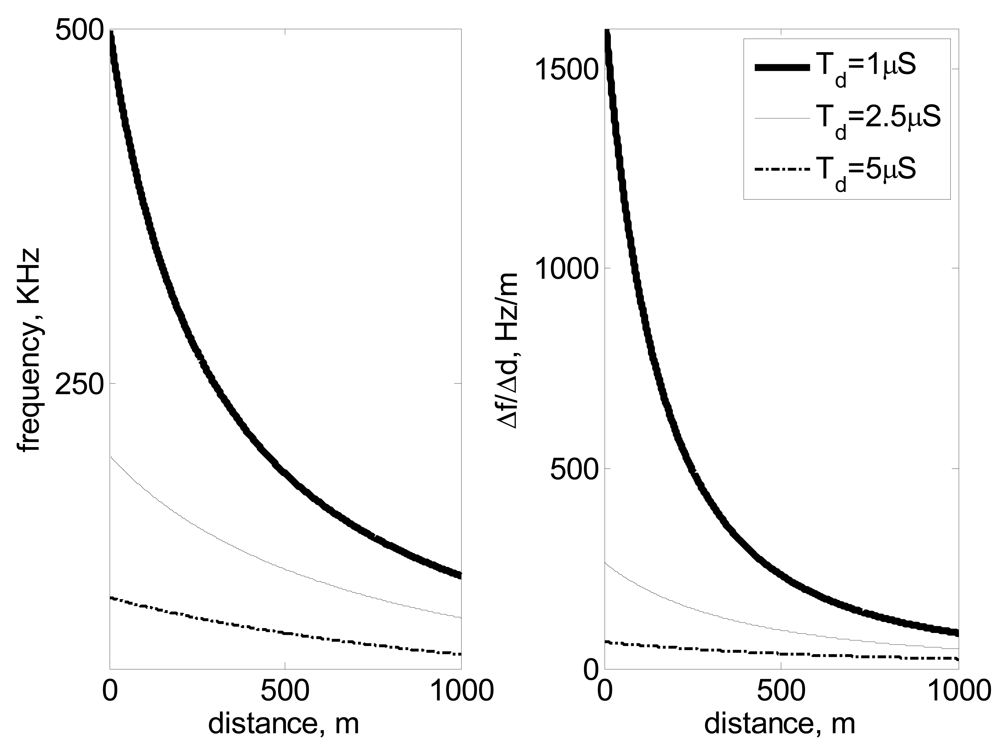
Рисунок 2. Обнаруженная частота в зависимости от измеренного расстояния слева, чувствительность как в зависимости от расстояния справа.
Разрешение по расстоянию зависит также от времени измерения. Расчет расстояния определяется измерением частоты, поэтому точность расчета частоты пройденного импульса связана с разрешением по расстоянию. На рис. 3 показано изменение ошибок в зависимости от времени измерения. Когда время измерения велико, частота точна и ошибка мала; если время измерения мало, ошибка увеличивается.
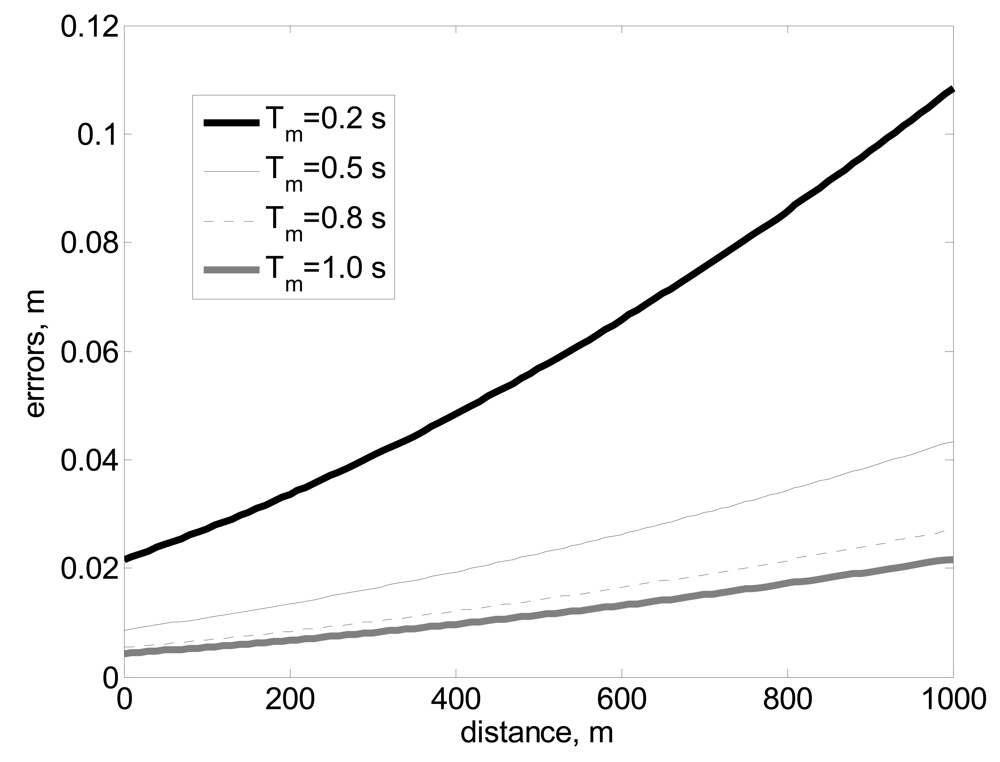
Рисунок 3. Зависимость расстояния от ошибок в зависимости от времени измерения Tm в секундах.
В нашем проекте основной целью было обнаружение автономного транспортного средства на площади 1 км2 с точностью около 10 см. Для достижения этой цели в прототипе используется Td = 2,68 мкСм, это подразумевает и чувствительность в диапазоне от 232 до 46 Гц (см. Таблицу 2). Время измерения было зафиксировано равным 1 секунде (Tm = 1 с). При этих параметрах для измеряемой частоты достигается разрешение 1 Гц с теоретической точностью d от 1 мм до 4 мм. Реальная точность будет ниже из-за различий в параметрах системы и радиочастотных отражений. Как уже упоминалось, Td включает в себя моностабильные задержки повторения и все остальные задержки. Максимальное расстояние, которое нужно было измерить, составило 1 км, а передатчики имеют больший радиус действия.
Таблица 2. Частоты и чувствительность в зависимости от расстояний: временная задержка Td (мкСм) для повторения импульсов, частота f0 и f1Km, обнаруженная на расстоянии 0 или 1 км, чувствительность на расстоянии 10 м и 1 км соответственно.
Реальные измеренные данные можно увидеть на рисунке 4. Обратите внимание, что реальные данные с высокой степенью точности соответствуют прогнозируемому поведению, показанному в уравнении (1).
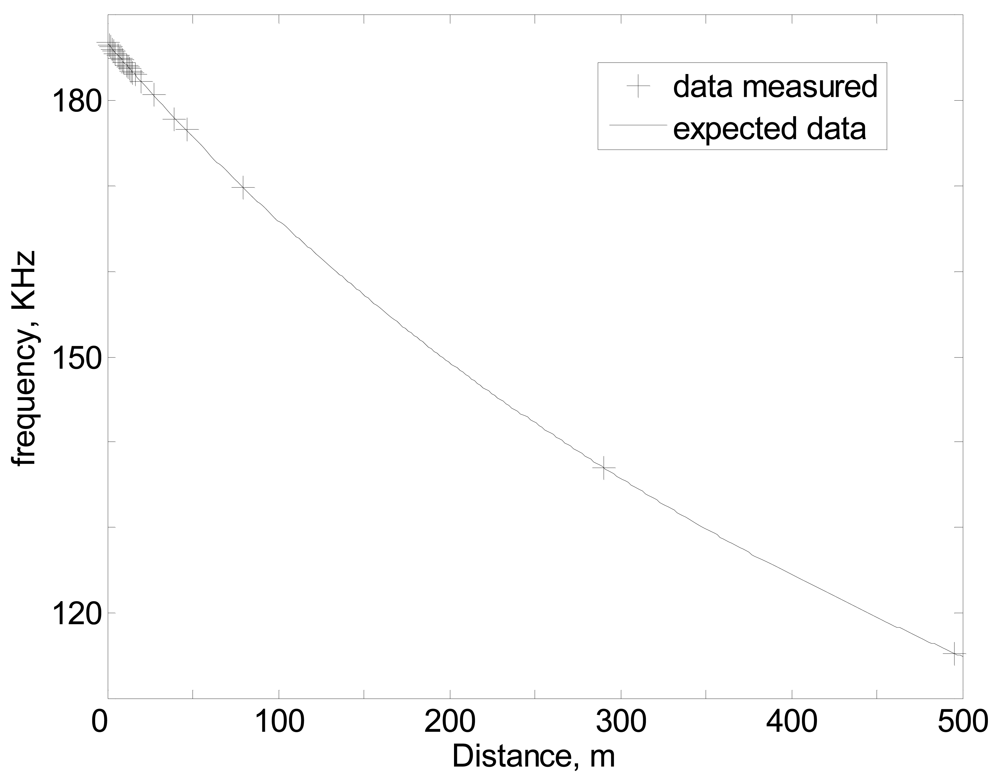
Рисунок 4. Измеренная частота в зависимости от расстояния.
3. Описание прототипа
Наш прототип, изображенный на рисунке 1, состоит из двух разных терминалов, расположенных на обоих концах измеряемого расстояния. Каждый терминал состоит из трех различных элементов: 1. Передатчик радиочастотных импульсов (T1 и T2 на рисунке 1), 2. Моностабильная интегральная схема, необходимая для повторения и задержки импульса (повторитель импульсов) и 3. Приемник радиочастотных импульсов. (Р1 и Р2). Помимо этих элементов, Терминал 1 включает в себя простой микроконтроллер (рис. 5), задачами которого являются:
• Для генерации первого импульса, который будет отправлен с терминала 1 на терминал 2.
• Для обнаружения генерируемой частоты с помощью внутреннего счетчика микроконтроллера.
• Преобразовать захваченную частоту в расстояние на основе уравнения (1).
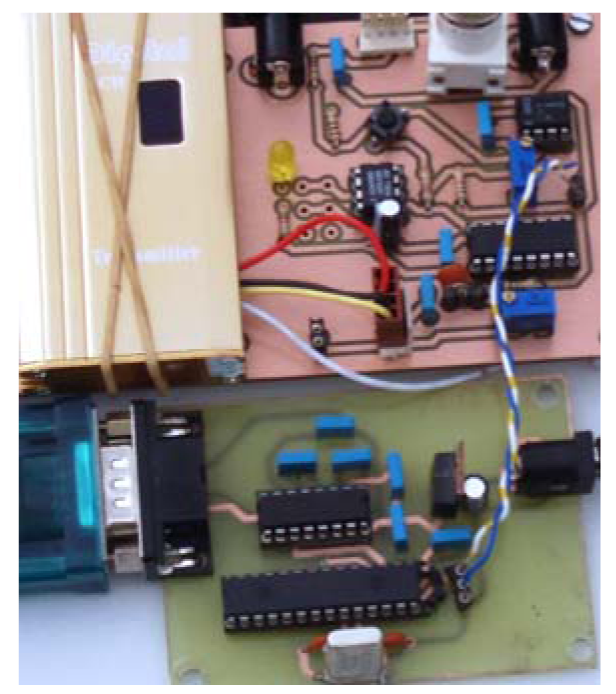
Рисунок 5. Фотография клеммы 1: ВЧ-передатчик вверху слева, схема повторителя импульсов вверху справа и плата микроконтроллера внизу.
Наша система использует две разные частоты, чтобы избежать помех: одну частоту f1 для отправки импульсов от терминала 1 к терминалу 2 и вторую частоту, f2, для импульсов от терминала 2 к терминалу 1 (см. рисунок 1). Очевидно, что эту же систему можно использовать и для измерения длины кабеля, для этого каждая клемма должна быть расположена на каждом конце кабеля, радиомодуль не нужен, поскольку электрический импульс проходит по кабелю.
Стоимость материала нашего прототипа, в основном стоимость интегральной схемы, составляет менее 5 евро при использовании для измерения длины кабеля и около 100 евро при использовании для измерения расстояний, но в последнем случае около 90% этой стоимости приходится на радиоданные. модули.
3.Декартова позиция мобильной системы.
Описанную здесь систему можно использовать в качестве системы локализации. Для этого приложения необходимо измерить два расстояния от двух разных фиксированных точек (см. рисунок 6). Расчет положения автомобиля определяется с использованием этих расстояний. Трилатерация применяется для решения проблемы местоположения. Схему локализации можно увидеть на рисунке 6. Расстояние между двумя фиксированными точками (d), а также между каждой из этих фиксированных точек и транспортным средством (d1,d2) известны, поэтому можно рассчитать радиус окружностей, см. Рисунок 6, а декартова позиция (x,y) определяется уравнениями (3) и (4)
. 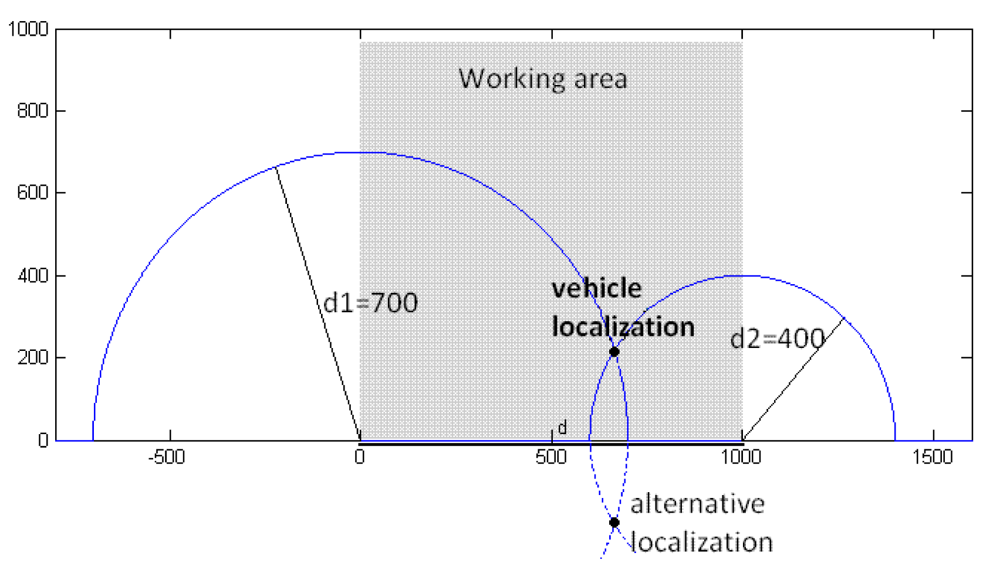
Рисунок 6. Схема локализации, расстояние между двумя фиксированными точками известно, координаты прототипа можно рассчитать с помощью расстояний d1 и d2.
При использовании этой схемы только с двумя измерениями (d1 и d2) появляется альтернативная точка локализации. Он отбрасывается, поскольку находится за пределами рабочей области. Система работает только внутри заранее определенной рабочей зоны. Радиус каждого круга — это расстояние от каждой фиксированной точки до прототипа. Таким образом, уравнение (3) применяется для расчета локализации транспортного средства (x,y):
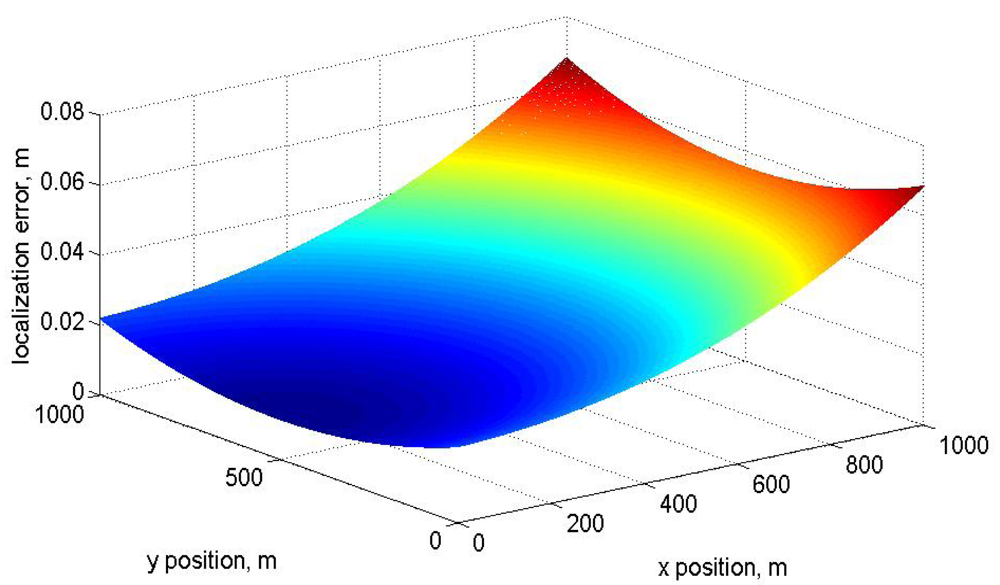
Рисунок 7. Ошибка локализации как функция декартовых позиций.
Ориентацию прототипа можно получить, если на мобильном устройстве установлены две системы локализации. Эти системы необходимо разделить, чтобы получить декартовы координаты каждой системы (x1,y1), (x2,y2). Ориентацию прототипа можно рассчитать с помощью этих координат, используя уравнение (6), где xdif — это разница между координатами x1 и x2 и ydif между координатами y1 и y2. Ошибка ориентации пропорциональна расстоянию систем, установленных в прототипе, и точности расчета (x,y): (6)
На рис. 8 показана зависимость ошибки ориентации от расстояния между датчиками и угла ориентации. На этом графике декартово положение транспортного средства зафиксировано как x = 500 м, y = 500 м. Если представить ошибку в декартовом положении, получится рисунок 9, где расстояние между двумя датчиками в прототипе зафиксировано на уровне 1 м. Ошибка как функция ориентации отображается разными цветами.
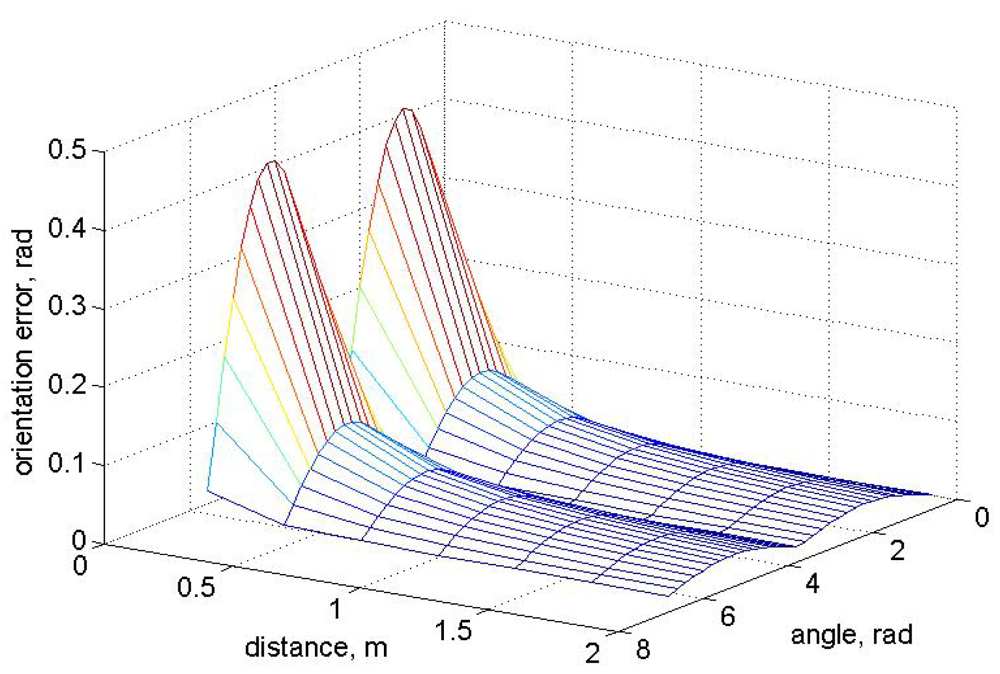
Рисунок 8. Угол ошибки ориентации в зависимости от расстояния между датчиками и угла ориентации для фиксированного декартова положения.
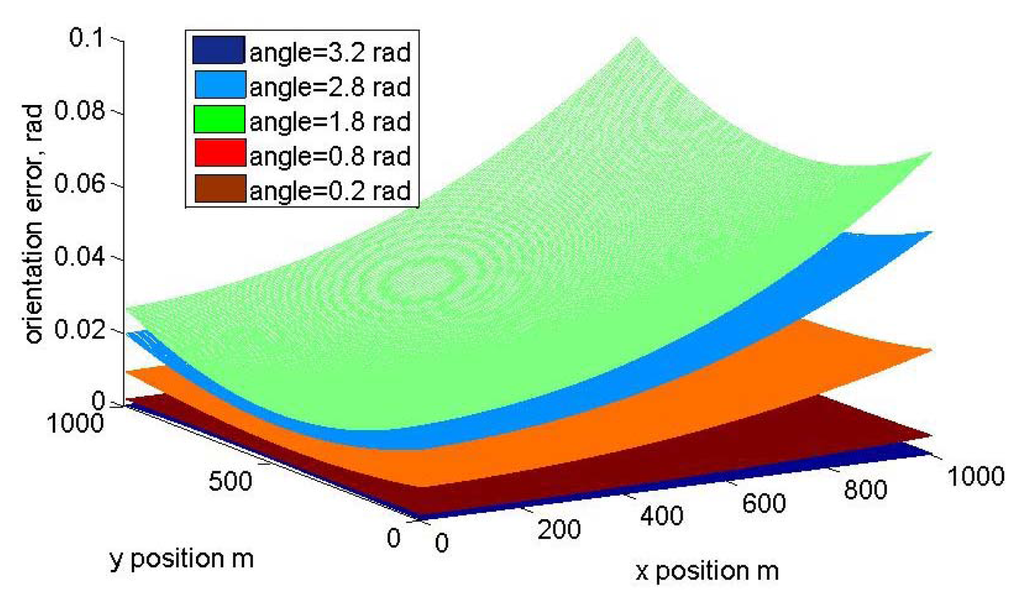
Рисунок 9. Угол ошибки ориентации в зависимости от декартовой позиции для расстояния между датчиками 1 м, каждый график представляет разную ориентацию.
4.Нестатические измерения
Если прототип движется, частота измерения изменяется в зависимости от скорости транспортного средства Vν и времени измерения Tm. Уравнение (7). Ошибка увеличивается с увеличением скорости прототипа и времени измерения. Рис. 10. Для мобильной системы более высокая точность достигается при использовании небольшого времени измерения. Ошибка будет пропорциональна Vν и Tm, поэтому основной источник ошибки пропорционален скорости движения прототипа. На рисунке 10 показано изменение ошибки в зависимости от скорости и расстояния для различного времени измерения. Основным источником ошибок является скорость, поэтому для более точной оценки расстояния необходимо сократить время измерения. Детали представлены на рисунке 10, где можно оценить нелинейную ошибку как функцию расстояния:
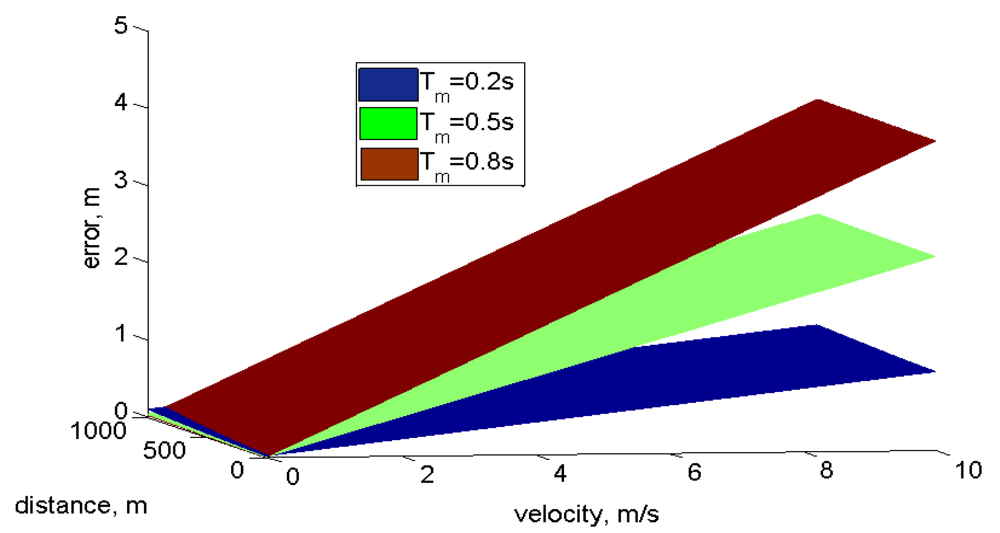
Рисунок 10. Ошибка расчета расстояния в зависимости от скорости движения прототипа при разном времени измерения.
Другой способ увидеть ошибку — это задержка измерения. Позиция получена не в реальном времени, позиция получена на секунды назад, когда прототип находился на предыдущем месте. Когда система остановится, положение будет рассчитано снова с хорошим разрешением.
6. Выводы
Очень простой прототип для измерения расстояний и длины кабеля построен на основе простого алгоритма. Основой нашего устройства являются непрерывные повторения электрического импульса, который бесконечно перемещается вперед и назад по измеряемому расстоянию или кабелю. Бесконечное перемещение импульса генерирует частоту, которая меняется почти обратно пропорционально измеряемому расстоянию. Диапазон частот и разрешение измеряемого расстояния будут зависеть от диапазона измеряемых расстояний и временной задержки, необходимой для повторения импульса на каждом конце. В предлагаемой системе используется простое и недорогое электронное устройство на базе базового микроконтроллера, выполняющее основные задачи. Система успешно прошла испытания на расстояниях от 0 до 500 м с точностью до 10 см. Эту систему можно использовать в качестве локальной системы позиционирования для определения местоположения и ориентации мобильных систем.
Магазин
Gtest® - авторизованный поставщик кабельных тестеров в
Украину: https://gtest.com.ua/izmeritelnye-pribory/iskateli-skrytoi-provodki

")


Сети с большой скоростью передачи данных требуют более точных измерений Сегодняшние высокотехнологичные центры обработки данных образуют цифровое сердце связи и торговли в нашем мире. Н.. →

Магазин Gtest® предлагает широкий ассортимент кабельных тестеров, а также приборов для тестирования кабельных и сетевых инфраструктур. Краткое введение в теорию тестеров сетевых кабелей .. →
Магазин Gtest(R) предлагает широкую номенклатуру кабельных тестеров по ссылке в самом конце настоящего Раздела, а также рекомендуемые приборы для тестирования кабельных и сетевых инфраструктур. Так.. →

Независимо от того, являетесь ли вы опытным ИТ-специалистом или только начинаете свой путь в инфраструктуре кабельных сетей, понимание различных типов тестеров кабелей необходимо для поддержания качес.. →
Тестеры кабелей - это ручные, настольные или напольные электронные устройства, которые измеряют электрические и физические свойства кабелей. Они используютс.. →